Chapitre 2
--------------------------------------------------------------------------------------------------------------------------
1. Historique
Le bus I2C ( Inter Integrated Circuit Bus ) est le bus historique, développé par Philips pour les applications de domotique et d'électronique domestique au début des années 80, notamment pour permettre de relier facilement à un microprocesseur les différents circuits d'un téléviseur moderne.
C'est le bus qui a émergé de la guerre des standards lancée par tous les acteurs du monde électronique. Ainsi, dans votre téléviseur, tous les ensembles sont sur un bus I2C ( Récepteur télécommande, réglages ampli BF, tuner, horloge, gestion péritel…)
Il existe d'innombrables périphériques exploitant ce bus, il est même implantable par logiciel dans n'importe lequel des microcontrôleurs. Le poids de l'industrie de l'électronique grand public a imposé des prix très bas aux nombreux composants.
2. Caractéristiques
Le bus I2C permet de faire communiquer entre eux des composants électroniques très divers grâce à seulement trois fils :
- un signal de donnée ( SDA ),
- un signal d'horloge ( SCL ),
- un signal de référence électrique ( Masse ).
Ceci permet de réaliser des équipements ayants des fonctionnalités très puissantes ( En apportant toute la puissance des systèmes microprogrammés ) et conservant un circuit imprimé très simple, par rapport un schéma classique ( 8bits de données, 16 bits d'adresse + les bits de contrôle ).Les données sont transmises en série à 100Kbits/s en mode standard et jusqu'à 400Kbits/s en mode rapide. Ce qui ouvre la porte de cette technologie à toutes les applications où la vitesse n'est pas primordiales.
De nombreux fabricants ayant adopté le système, la variété des circuits disponibles disposant d'un port I2C est énorme : Ports d'E/S bidirectionnels, Convertisseurs A/N et N/A, mémoires ( RAM, EPREM, EEPROM, etc... ), Circuits Audio ( Egaliseur, Contrôle de volume, ... ) et autre drivers ( LED , LCD , ...).
Le nombre de composants qu'il est ainsi possible de relier est essentiellement limité par la charge capacitive des lignes SDA et SCL : 400 pF .
3. Principe
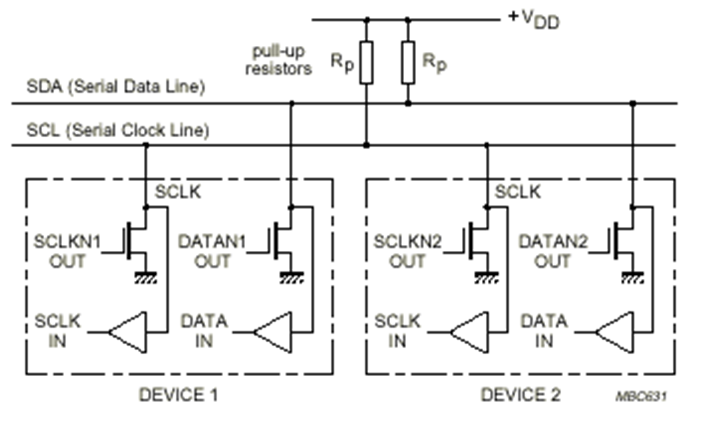
Afin de d'éviter les conflits électriques les Entrées/Sorties SDA et SCL sont de type "Collecteur Ouvert". Cela permet ainsi la présence de plusieurs maîtres sur le bus.
Structure d'E/S d'un module I2C :
4. Le protocole I2C
Le protocole I2C définit la succession des états logiques possibles sur SDA et SCL, et la façon dont doivent réagir les circuits en cas de conflits.
4.1. La prise de contrôle du bus
Pour prendre le contrôle du bus, il faut que celui-ci soit au repos ( SDA et SCL à '1').
Pour transmettre des données sur le bus, il faut donc surveiller deux conditions particulières :
Lorsqu'un circuit, après avoir vérifié que le bus est libre, prend le contrôle de celui-ci, il en devient le maître. C'est lui qui génère le signal d'horloge.
- La condition de départ. ( SDA passe à '0' alors que SCL reste à '1' )
- La condition d'arrêt. ( SDA passe à '1' alors que SCL reste à '1' )
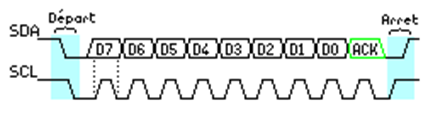
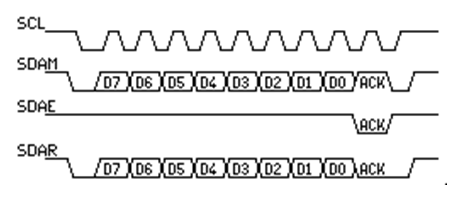
4.2. La transmission d'un octet
- Après avoir imposé la condition de départ, le maître applique sur SDA le bit de poids fort D7.
- Il valide ensuite la donnée en appliquant pendant un instant un niveau '1' sur la ligne SCL.
- Lorsque SCL revient à '0', il recommence l'opération jusqu'à ce que l'octet complet soit transmis.
- Il envoie alors un bit ACK à '1' tout en scrutant l'état réel de SDA.
- L'esclave doit alors imposer un niveau '0' pour signaler au maître que la transmission s'est effectuée correctement.
- Les sorties de chacun étant à collecteurs ouverts, le maître voie le '0' et peut alors passer à la suite.
Dans cet exemple :
- SCL : Horloge imposée par le maître.
- SDAM : Niveaux de SDA imposés par le maître.
- SDAE : Niveaux de SDA imposés par l'esclave.
- SDAR : Niveaux de SDA réels résultants.
4.3. La transmission d'une adresse
Le nombre de composants qu'il est possible de connecter sur un bus I2C étant largement supérieur à deux, il est nécessaire de définir pour chacun une adresse unique.
L'adresse d'un circuit, codée sur sept bits, est défini d'une part par son type et d'autre part par l'état appliqué à un certain nombre de ces broches. Cette adresse est transmise sous la forme d'un octet au format particulier.
On remarque ici que les bits D7 à D1 représentent les adresse A6 à A0, et que le bit D0 et remplacé par le bit de R/W qui permet au maître de signaler s'il veut lire ou écrire une donnée.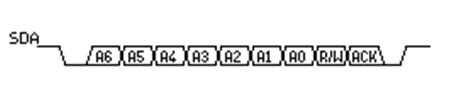
Le bit d'acquittement ACK fonctionne comme pour une donnée, ceci permet au maître de vérifier si l'esclave est disponible.
Note 1: Cas particulier des mémoires :
L'espace adressable d'un circuit de mémoire étant sensiblement plus grand que la plupart des autres types de circuits, l'adresse d'une information y est codée sur deux octets ou plus. Le premier représente toujours l'adresse du circuit, et les suivants l'adresse interne de la mémoire.
Note 2: Les adresses réservées.
Les adresses 00000XXX et 111111XX sont réservés à des modes de fonctionnement particuliers.
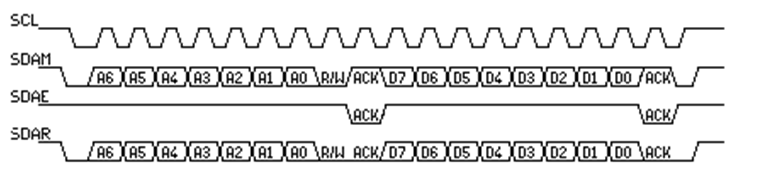
4.4. Ecriture d'une donnée
L'écriture d'une donnée par le maître ne pose pas de problème particulier :
Note : Cas particulier d'utilisation d'ACK :
L'écriture d'un octet dans certains composants ( Mémoires, microcontrôleur, ... ) peut prendre un certain temps. Il est donc possible que le maître soit obligé d'attendre l'acquittement ACK avant de passer à la suite.4.5. Lecture d'une donnée
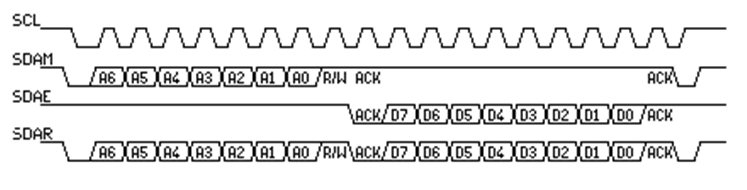
La lecture d'une donnée par le maître se caractérise par l'utilisation spéciale qui faite du bit ACK. Après la lecture d'un octet, le maître positionne ACK à '0' s'il veut lire la donnée suivante ( cas d'une mémoire par exemple ) ou à '1' la cas échéant. Il envoie alors la condition d'arrêt
5. La gestion des conflits
5.1. Mise en situation
La structure même du bus I2C a été conçu pour pouvoir y accueillir plusieurs maîtres. Se pose alors le problème commun à tout les réseaux utilisant un canal de communication unique : la prise de parole.
En effet, chaque maître pouvant prendre possession du bus dès que celui-ci est libre, il existe la possibilité de que deux maîtres prennent la parole en même temps. Si cela ne pose pas de problème sur le plan électrique grâce à l'utilisation de collecteurs ouverts, il faut pouvoir détecter cet état de fait pour éviter la corruption des données transmises.
5.2. Principe
Comme nous l'avons vu précédemment, pour prendre le contrôle du bus, un maître potentiel doit d'abord vérifier que celui-ci soit libre, et qu'une condition d'arrêt ait bien été envoyée depuis au moins 4,7µs. Mais il reste la possibilité que plusieurs maîtres prennent le contrôle du bus simultanément.
Chaque circuit vérifie en permanence l'état des lignes SDA et SCL, y compris lorsqu'ils sont eux même en train d'envoyer des données. On distingue alors plusieurs cas :
(1) Les différents maîtres envoient les mêmes données au même moment :
(2) Un maître impose un '0' sur le bus :
- Les données ne sont pas corrompues, la transmission s'effectue normalement, comme si un seul maître avait parlé. Ce cas est rare.
(3) Un maître cherche à appliquer un '1' sur le bus :
- Il relira forcément '0' et continuera à transmettre. Il ne peut pas alors détecter un éventuel conflit.
- Si il ne relit pas un niveau '1', c'est qu'un autre maître a pris la parole en même temps. Le premier perd alors immédiatement le contrôle du bus, pour ne pas perturber la transmission du second. Il continue néanmoins à lire les données au cas celles-ci lui auraient été destinées.
5.3. Exemple
Soit le chronogramme suivant :
Dans cet exemple :
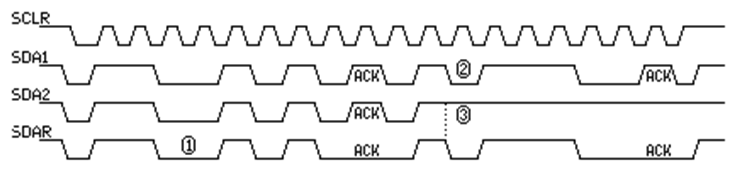
- SCLR : Horloge résultante.
- SDA1 : Niveaux de SDA imposés par le maître n°1.
- SDA2 : Niveaux de SDA imposés par le maître n°2.
- SDAR : Niveaux de SDA réels résultants lus par les deux maîtres.
5.4 Analyse :
Le premier octet est transmis normalement car les deux maîtres imposent les même données. (Cas n°1). Le bit ACK est mis à '0' par l'esclave.Lors du deuxième octet, le maître n°2 cherche à imposer un '1' (SDA2) , mais relit un '0' (SDAR), il perd alors le contrôle du bus et devient esclave (Cas n°3) . Il reprendra le contrôle du bus, lorsque celui-ci sera de nouveau libre.
Le maître n°1 ne voit pas le conflit et continue à transmettre normalement. (Cas n°2)
Au total, l'esclave à reçu les données du maître n°1 sans erreurs et le conflit est passé inaperçu.
5.5 Les nouvelles caractéristiques
Afin de compenser quelques lacunes des premières spécifications du bus I2C ( qui datent de 1982 ), quelques nouvelles améliorations ont été apportées à partir de 1993 :
- Le mode rapide : Le bus à désormais la capacité de transmettre des données jusqu'à une vitesse de 400 Kbit/s.
- Des entrées à triggers de Schmitt : Afin de limiter la sensibilité au bruit.
- La mise en haute impédance d'un circuit non alimenté : Ceci évite de bloquer le bus si un périphérique n'est pas alimenté.
- Extension à 10 bits de l'adressage des circuits répartis sur 2 octets de la manière suivante :
Remarque :
En 1998, le mode haut débit porte la vitesse maximum du bus I2C à 3.4 Mb/s. Les marges de bruit ont aussi été modifiées pour permettre de relier des circuits faible consommation ( alimentation 2V )6. Les adresses réservées
Les adresses 0000 0xxx ne sont pas utilisées pour l'adressage de composants. Elles ont été réservés par Philips pour effectuer certaines fonctions spéciales.
6.1. Adresses d'appel général
Adresse : 0000 0000 .
Après l'émission d'un appel général, les circuits ayant la capacité de traiter ce genre d'appel émettent un acquittement.
Le deuxième octet permet de définir le contenu de l'appel :
- 0000 0110 : RESET. Remet tout les registres de circuits connectés dans leur état initial ( Mise sous tension ). Les circuits qui le permettent rechargent leur adresse d'esclave.
- 0000 0010 : Les circuits qui le permettent rechargent leur adresse d'esclave.
- 0000 0100 : Les circuits définissant leur adresse de façon matériel réinitialisent leur adresse d'esclave.
- 0000 0000 : Interdit
- xxxx xxx1 : Cette commande joue le rôle d'interruption. xxxx xxx peut être l'adresse du circuit qui a généré l'interruption.
6.2. Octet de START
Adresse : 0000 0001 .
Cet octet est utilisé pour synchroniser les périphériques lents avec les périphériques rapides.6.3. Début d'adresse CBUS
Adresse : 0000 001x .L'émission de cet octet permet de rendre sourd tout les circuits I2C présents sur le bus. A partir de ce moment, on peut transmettre ce que l'on désire sur le bus, en utilisant par exemple un autre protocole. Le bus repasse en mode normal lors de la réception d'une condition d'arrêt.
6.4. Autres
Adresses : 0000 0110 à 0000 1111 .
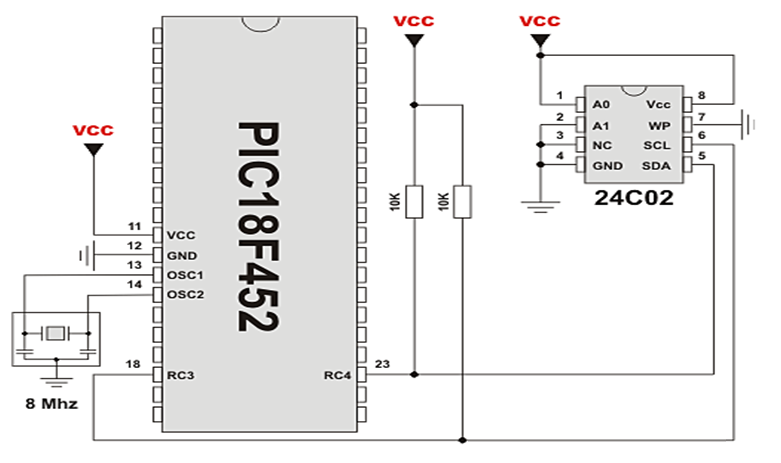
Ces octets ne sont pas définit et sont ignoré par les circuits I2C. Il peuvent être utilisé pour débugger un réseau multimaster.7. Esemple :
program Eeprom_Test;
var EE_adr, EE_data, k : byte;
jj : word;
begin
I2C_Init(100000); // Initialize full master mode
TRISD := 0; // PORTD is output
PORTD := $FF; // Initialize PORTD
I2C_Start; // Issue I2C start signal
I2C_Wr($A2); // Send byte via I2C(command to 24cO2)
EE_adr := 2;
I2C_Wr(EE_adr); // Send byte(address for EEPROM)
EE_data := $AA;
I2C_Wr(EE_data); // Send data(data that will be written)
I2C_Stop; // Issue I2C stop signal
for jj := 0 to 65500 do nop; // Pause while EEPROM writes data
I2C_Start; // Issue I2C start signal
I2C_Wr($A2); // Send byte via I2C
EE_adr := 2;
I2C_Wr(EE_adr); // Send byte(address for EEPROM)
I2C_Repeated_Start; // Issue I2C signal repeated start
I2C_Wr($A3); // Send byte (request data from EEPROM)
k := I2C_Rd(1); // Read the data
I2C_Stop; // Issue I2C stop signal
PORTD := k; // Show data on PORTD
while true do nop; // Endless loop
end.