
Le plan :
Introduction
I/ Historique et présentation
II/ Architecture et structure des automates
III/ Logique câblée VS programmée
IV/ Fonctionnement et dysfonctionnement
V/ Adressage et programmation des API
VI/ Exemples et applications
I/ Historique et présentation
Les automates programmables industriels sont apparus à lafin des années soixante, à la demande de l'industrie automobile américaine (General Motor), qui réclamait plus d'adaptabilité de leurs systèmes
de commande.

Avant : utilisation de relais électromagnétiques et de systèmes pneumatiques pour la réalisation des parties commandes = logique câblée.
Inconvénients : cher, pas de flexibilité, pas de communication possible.
Solution : utilisation de systèmes à base de microprocesseurs permettant une modification aisée des systèmes automatisés = logique programmée.

L'Automate Programmable Industriel (API) est un appareil électronique programmable, adapté à l'environnement industriel, qui réalise des fonctions d'automatisme pour assurer la commande de pré actionneurs et d'actionneurs à partir d'informations logique, analogique ou numérique.


But de l’automatisation
• Augmenter la sécurité
• Accroître la productivité
•Augmenter la compétitivité
• Économiser la matières première et l'énergie
• Superviser les installations et les machines
• Éliminer les tâches répétitives ou sans intérêt
• Simplifier le travail des agents
II/ Architecture et structure des automates

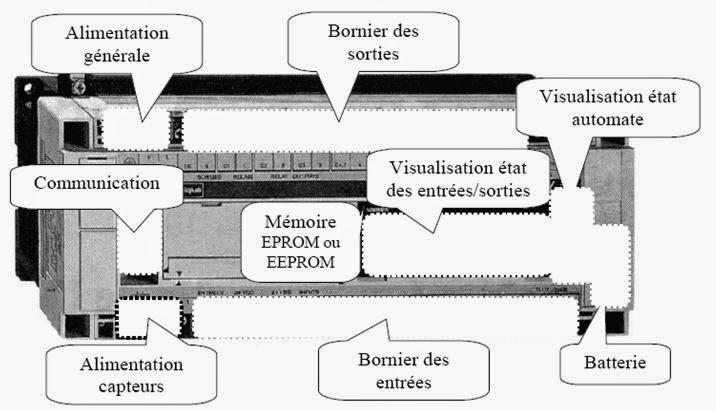
II – 1.1/ Structure détaillée d’un automate


II-2/ L’Architecture
?

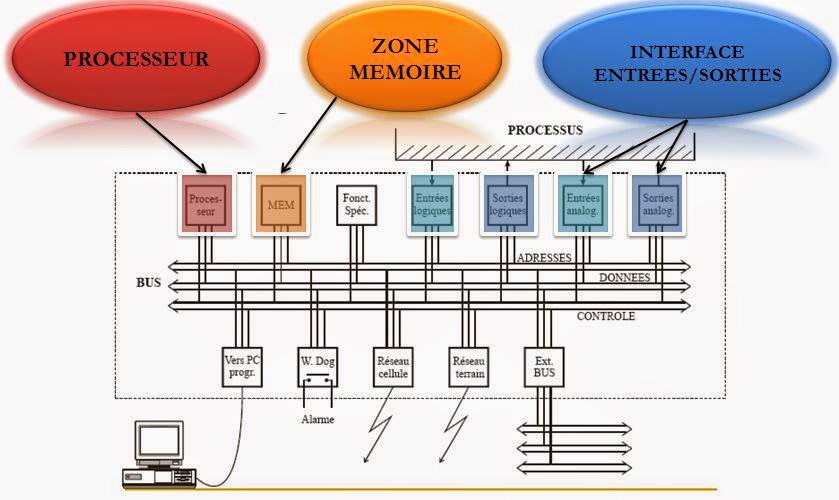
La structure interne d’un API se présente comme suite:

L'automate programmable reçoit les informations relatives à l'état du système et puis commande les pré-actionneurs suivant le programme inscrit dans sa mémoire.
Un API se compose donc de trois grandes parties :
III/ Logique câblée VS programmée



Logique câblée
qInconvénients:
q Volume du contrôleur proportionnel à la complexité du problème
q Des modifications de la commande implique des modifications de câblage
qAvantages:
q Vitesse car fonctionnement simultané des opérateurs
Logique programmée
q Avantages:
q Banalisation du matériel: même matériel quel que soit la fonction
logique à réaliser
q Facilité de modification de la loi de contrôle: il suffit de modifier le
programme. Simplification de la maintenance!
q Faible liaison entre le volume matériel et la complexité du problème
(effet simplement sur les entrées / sorties et taille mémoire)
qInconvénients:
q Vitesse inversement proportionnelle à la complexité du problème.
Ceci peut être une limitation pour des processus électromécaniques
rapides.
IV/ Fonctionnement et dysfonctionnement







Fin du processus

IV-II / Câblage des entrées / sorties d'un automate
a. Alimentation de l'automate
Réseau monophasé 230V ; 50 Hz mais d'autres alimentations sont possibles (110V etc.).
La protection magnétothermique Asservir par un circuit de commande spécifique (contacteur KM1).
De même, les sorties seront asservies au circuit de commande et alimentées après validation du chien de garde.

b. Alimentation des entrées de l'automate
L'automate est pourvu généralement d'une alimentation pour les capteurs/détecteurs
Les entrées sont connectées au OV (commun) de cette alimentation.
Les informations des capteurs/détecteurs sont traitées par les interfaces d'entrées
IV-III/ Causes de dysfonctionnements
Un dysfonctionnement peut avoir pour origine :
• Un composant mécanique défaillant (pré-actionneur, actionneur, détecteur,...).
• Un câblage incorrect ou défaillant (entrées, sorties).
• Un composant électrique ou électronique défectueux(interface d'entrée ou de sortie).
• Une erreur de programmation (affectation d'entrées-sorties, ou d'écriture).
• Un système non initialisé (étape, conditions initiales...).
V/ Adressage et programmation
A /Généralités
5 zones pour les objets langage :
- zone mémoire (%M)
- zone des entrées (%I)
- zone des sorties (%Q)
- zone des constantes (%K)
- zone système (%S)
- objet bit (X)
- objet mot simple longueur (W)
- octet (B) (format utilisé pour les opérations sur chaîne de caractères)
- double mot (D)
- Mots Flottants (F)
B/ Objets booléens : bits

C/ Exemples bits système: « %Si »


D/ Objets langage
- Objets d'entrées / sorties

- Exemples :
%I1.5........%Q4.5.......(pour les objets de format booléen , le X peut être omis )
%QW6.3.......%I4.MOD.ERR.........%I4.2.ERR.......( ERR indique un défaut )
- Syntaxe - Adressage topologique
% I x.v / % Q x.v x=emplacement: 0 à 10
% I W x.v / % Q W x.v v= voie : 0 à 31 ou MOD module
- Un module 64 E/S est vu comme deux modules 1/2 format
% I x . i (i=0 à 31) x impair
et % Q (x+1) . i (i=0 à 31)
- Exemples
% I 1.5 : Bit d'entrée 5, module 1
% Q3.4 : Bit de sortie 4, module 3
% IW5.0 : Mot d'entrée voie 0, module 5
% I1.5.ERR : information défaut module 1, voie 5
% I1.MOD.ERR : information défaut module 1
E/ Adressage d’objets d’E/S (TSX Micro)

F/ Programmation
Il existe 4 langages de programmation des automates qui sont normalisés au plan mondial par la norme CEI 61131-3.
Chaque automate se programmant via une console de programmation propriétaire ou par un ordinateur équipé du logiciel constructeur spécifique.
1/ Liste d'instructions
(IL : Instruction List) : Langage textuel de même nature que l'assembleur (programmation des microcontrôleurs).
Très peu utilisé par les automaticiens.

2/ Langage littéral structuré (ST : Structured Text) :
Langage informatique de même nature que le Pascal, il utilise les fonctions comme if ... then ... else ... (si ... alors ... sinon ...)
Peu utilisé par les automaticiens.

3/ Langage à contacts (LD : Ladder diagram) :
Langage graphique développé pour les électriciens. Il utilise les symboles tels que : contacts, relais et blocs fonctionnels et s'organise
en réseaux (labels). C'est le plus utilisé
4/ Blocs Fonctionnels (FBD : Function Bloc Diagram) :
Langage graphique ou des fonctions sont représentées par des rectangles avec les entrées à gauche et les sorties à droites. Les blocs sont programmés (bibliothèque) ou programmables. Utilisé par les automaticiens.

5/ Programmation à l'aide du GRAFCET
(SFC : Sequential Function Chart)
Le GRAFCET est utilisé par certains constructeurs d'automate (Schneider, Siemens ) pour la programmation. Parfois associé à un langage de programmation, il permet une programmation aisée des systèmes séquentiels tout en facilitant la mise au point des programmes ainsi que le dépannage des systèmes.

VI/ Exemples et applications
PLC: Les grandes marques





APPLICATIONS


Processeur
Structure d’une carte processeur moderne

Le microprocesseur
Le microprocesseur réalise toutes les fonctions logiques ET, OU, les fonctions de temporisation, de comptage, de calcul... à partir d'un programme contenu dans sa mémoire.
Il est connecté aux autres éléments (mémoire et interface E/S) par des liaisons parallèles appelées 'BUS ' qui véhiculent les informations sous forme binaire













